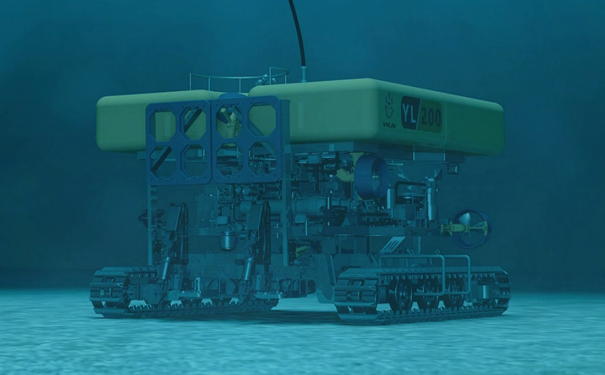
水下遥控航行器虚拟仿真培训系统主要用于航行器真实操纵环境的模拟,以及自主航行、侦查、跟踪等操作过程的模拟,基于航行器的模拟操控模型、运动学仿真模型、以及与航行器训练任务相配套的载荷模型,提供与实际设备操控方式相近或一致的模拟操控体验,帮助学员熟悉航行器的操作与使用,使其快速具备指挥和实操保障的能力。

1.水下遥控航行器虚拟仿真培训系统功能
1.1 数据通信
实现模拟操控平台与航行器仿真模型之间的数据传输功能,根据不同应用场景选配网络通信、水声通信、无线电通信等通信设备。
1.2 模拟操控功能
支持对航行器进行模拟操控,支持路径规划、控制模式切换、运动控制、动力控制、重力调节、单元模块控制、载荷控制等功能。
(1)路径规划:提供预编程、航段规划、多边形规划、矩形规划、标记等路径规划功能。
(2)控制模式切换:支持手动模式、自主模式、待机模式等控制模式切换功能。
(3)运动控制:模拟操控航行器的运动方向。
(4)动力控制:提供电机、舵机等动力设备的模拟操控功能。
(5)重力调节:提供系统调平与闭环控制功能。
(6)单元模块控制:支持对每个舵机分别进行单元模块控制。
(7)载荷控制:控制与任务配套的载荷设备的上下电。
1.3 状态监测功能
实时监测航行器自主航行或任务操控训练的过程,实时显示航行器的航向、航速、位置、姿态、任务状态、载荷状态等信息,同时具备故障预警功能。
1.4 载荷控制功能
搭载CTD、ADCP、多波束测深声呐、侧扫声呐、水声通信、无线通信等6种载荷模型,支持对上述载荷模型进行模拟操控。
1.5 电子地图
通过提取电子地图相关图层的有效信息,获取实时的环境数据,包括岛屿、礁石、浮标等数据,为航行器的航行与避碰提供有效数据支撑,同时以电子地图为背景,标绘航行器的实时航迹。
1.6 巡航任务规划
通过模拟操控软件预设航行器的自主巡航路线,在获取目标位置、计划航线等信息后,航行器仿真模型启动自主巡航模式,根据自身位置和目标航路规划运动路径,最终按照计划在目标航路上巡航。
1.7 参数配置
支持系统配置、状态测试、参数装订、控制模式设置、通信设置等相关参数的配置功能。
(1)状态测试:支持对电机、舵机、传感器等进行状态检查。
(2)参数装订:包括任务参数装订、电机参数装订、舵机参数装订、运动参数装订等。
(3)控制模式设置:支持配置自动模式、手动模式、待机模式等控制模式。
(4)通信设置:支持配置通信类型及其相关的通信参数。

2. 水下遥控航行器虚拟仿真培训系统建设内容
水下遥控航行器虚拟仿真培训系统主要由电子地图、路径规划、模拟操控、状态监测块及系统配置等5大子模块组成
2.1 电子地图子模块
电子地图支持地图显示功能,通过加载图层、地图对象和坐标投影及其功能控件,实现地图缩放、地图平移、坐标信息显示等功能,同时以测绘工具为辅助,实现基本的绘图功能。
2.2 路径规划子模块
路径规划主要实现预编程、航段规划、多边形规划、矩形规划、标记等功能。
2.3 模拟操控子模块设计
模拟操控主要实现控制模式切换、运动控制、动力控制、重力调节、单元模块控制、载荷控制、紧急操作等功能。
2.4 状态监测子模块
状态监测子模块主要实现状态显示、状态检查、故障预警三部分功能,其中,状态显示包括导航状态显示、任务状态显示、驾驶状态显示、航行姿态显示、电池状态显示、传感器状态显示、通信状态显示;状态检查包括传感器状态检查、电池状态检查、电机状态检查和舵机状态检查;故障预警由故障报警、故障清除和故障屏蔽三部分组成。
2.5 系统配置子模块
利用系统配置子模块可以进行通信配置、控制模式设置、参数装订、日志管理等工作。

水下遥控航行器虚拟仿真培训系统实现了学员水下遥控航行器的模拟操控练习和理论知识学习。该系统由理论学习子系统与仿真模拟子系统组成,参照公开资料和相关内部数据,配套相应的硬件设施,并采用计算机仿真技术对水下遥控航行器、配套载荷、海洋环境等进行建模仿真,达到“环境模拟逼真,教学演示直观,理论学习高效,技能训练便捷”的建设目标,助力教员的“教”和学员的“学”与“训”。