

水下潜航器模拟仿真训练系统
水下潜航器模拟仿真训练系统是一套设备海洋模拟训练仿真系统,集合航行器、水下滑翔机、无人艇、缆控水下机器人等4种海洋设备相关基础理论知识学习、演示教学、航行操控、载荷操控训练及综合运用演练等训练内容,让学员进行4种海洋设备理论知识学习,以及操控指挥任务的训练。可有效地辅助提升学员操作技能,强化对4种海洋设备及搭载设备的掌握和灵活运用,全面提高学员的综合能力。
水下潜航器模拟仿真训练系统
水下潜航器模拟仿真训练系统是一套设备海洋模拟训练仿真系统,集合航行器、水下滑翔机、无人艇、缆控水下机器人等4种海洋设备相关基础理论知识学习、演示教学、航行操控、载荷操控训练及综合运用演练等训练内容,让学员进行4种海洋设备理论知识学习,以及操控指挥任务的训练。可有效地辅助提升学员操作技能,强化对4种海洋设备及搭载设备的掌握和灵活运用,全面提高学员的综合能力。
功能模块
-
理论学习
基础理论学习功能帮助用户进行理论学习。学员可以在线选择感兴趣的课程,查看课程的详细内容。通过列表可以查看当前学习进度,并且支持输入关键字进行课程搜索。
-
教学演示
教员可选择指定教学课目进行相关教学,支持文字、图片的形式演示教学。通过三维模型,演示四种海洋设备的组成,实现对海洋设备总体布置、载荷位置、海洋设备外观及内部组成理论知识教学。三维模型支持鼠标拖拽移动操作、旋转操作、放大操作、缩小操作。通过音、视频的形式,演示四种海洋设备布放与回收过程,辅助学员了解海洋设备布放与操作。教员可以对教学演示所用的文件资料进行增加、删除、搜索、查看。
-
操控模拟
在航行器、水下滑翔机、无人艇、缆控水下机器人等4型海洋设备的运动仿真模型,以及摄像机、侧扫声呐、多波束测深声呐、前视避障声呐、矢量听水器、CTD、ADCP、惯导、水下机械臂、水声通信、无线通信等11种载荷仿真模型的基础上进行模拟操控。包括模拟操控平台与各型海洋设备进行交互通信的功能;4型海洋设备的模拟操控功能;控制模式切换功能;4型海洋设备的状态监测功能;11种载荷的模拟操控功能;4型海洋设备的航路规划功能等。
-
海洋环境模拟
模拟训练海区的环境场景,包括海洋特征、气象特征、动态目标、静态景物等。支持设置海水的颜色、海水能见度;模拟不同海面风速风向影响下的海浪效果;模拟洋流,可以自定义设置流速流向。模拟各种气象特征,包含晴天、雨天、阴天、雾天等。模拟水面船舶航行过程中常见的各种目标船动态目标,以及水面、岸上、水下各种常见的景物。
-
考核与评估
考核功能包含理论学习考核与模拟操控考核。理论学习考核包含用户管理、题库管理、考试管理和成绩管理四个模块,题库管理支持选择题、填空题、判断题、问答题、论述题等多种考核题型;考试管理支持随机出题、在线考试、问答题人工判卷、客观题自动判卷等功能。模拟操控考核通过模糊评价法、层次分析法、灰度综合评价法等多种评估方法建立模拟操控定量评估方法,以参训人员的操作准确度、操作熟练度等为评估指标建立评估指标体系,实现模拟操控效果的自动化定量评估。操作过程数据可以视频的形式进行录制、存档、回放。
模拟操控实训内容
-
1
航行器
模拟仿真训练系统模拟航行器的初始化设置、布放流程、自主航行流程、手动操控流程、目标跟踪定位流程。航行器的初始化设置是对航行器的基础功能进行设置,例如,手动控制模式、自主航行模式、航行状态监测、CTD载荷、侧扫声呐载荷、ADCP载荷、多波束测深声呐载荷等。布放是操控航行器进行模拟训练的基础,布放后通过模拟操控,使航行器以最短的时间移动到目标位置。自主航行流程与手动操控流程是航行器模拟操控的基础流程,而目标跟踪定位流程属于进阶操作,需要针对具体侦查区域进行巡逻,完成指定的光电流程和红外流程,包括搜索目标、目标捕获跟踪、激光测距等操作。
-
2
水下滑翔机
模拟仿真训练软件模拟水下滑翔机的初始化设置、常规工作流程、手动操控流程、自主滑翔流程。水下滑翔机的初始化设置是对水下滑翔机的基础功能进行设置,例如,手动控制模式、自主滑翔模式、滑翔状态监测、CTD载荷、矢量水听器载荷等。水下滑翔机的模拟操作训练是循序渐进的过程,先对常规工作流程进行模拟操作,而后进行手动操控与自主滑翔的操作训练,由浅入深地进行学习。
-
3
无人艇
模拟仿真训练系统模拟无人艇的初始化设置、通讯流程、自主航行流程、手动操控流程、航迹跟踪流程、摄像头操控流程。无人艇的初始化设置是对无人艇的基础功能进行设置,例如,手动控制模式、自主航行模式、航行状态监测、CTD载荷、摄像头载荷、照明灯载荷、ADCP载荷等。由于无人艇需要接受指令才能正常工作,所以无人艇的操控通讯流程是无人艇操控的基础流程。自主航行流程与手动操控流程属于无人艇航行的模拟操控,而航迹跟踪流程与摄像头操控流程是无人艇的功能性模拟操控。
-
4
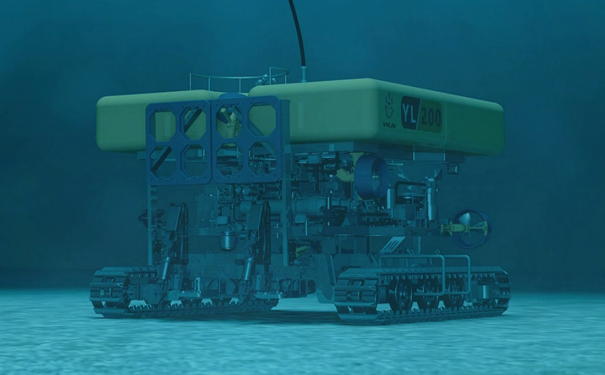
缆控水下机器人
模拟仿真训练软件模拟缆控水下机器人的初始化设置、操控面板信号采集流程、摄像头操控流程、手动操控流程、自动巡航流程。缆控水下机器人的初始化设置是对缆控水下机器人的基础功能进行设置,例如,手动控制模式、自主航行模式、航行状态监测、机械臂载荷、摄像头载荷、照明灯载荷、避障声呐载荷等。操控面板信号采集流程是缆控水下机器人模拟操控的基础,实时采集操控面板的操作信息,并同步生成控制指令,然后再把控制指令发送给机器人。摄像头操控流程是缆控水下机器人的功能性模拟操控,手动操控流程与自动巡航流程属于缆控水下机器人航行的模拟操控。





更多优秀案例
-

凿岩台车虚拟仿真训练系统
凿岩台车虚拟仿真训练系统是为陕西铁路工程职业技术学院打造的轨道交通智慧建造实训室项目,是一项结合了虚拟现实、仿真模拟和凿岩台车实际操作体验的综合性技术项目。通过凿岩台车半实物模拟仿真驾驶舱,结合凿岩台
了解详情 -
水下潜航器模拟仿真训练系统
水下潜航器模拟仿真训练系统是一套设备海洋模拟训练仿真系统,集合航行器、水下滑翔机、无人艇、缆控水下机器人等4种海洋设备相关基础理论知识学习、演示教学、航行操控、载荷操控训练及综合运用演练等训练内容,让
了解详情 -
水下机器人虚拟仿真培训系统
水下机器人虚拟仿真培训系统用于ROV水下机器人的模拟操作培训,分为教练端与学员端,教练端可以对学员的培训、考核进行设置,学员端根据教练端的设置进行培训或者考核。通过ROV下潜、机械臂操作的模拟,以及物
了解详情 -
设备虚拟拆装教学实验仿真实训系统
工业产品的维修,从设计之初就体现在对应产品的设计理念中。w88win手机版登录以各类工业设备的维修、保养过程为蓝本,仿真模拟对应结构、拆装步骤,还原设备真实的保养步骤。
了解详情 -

徐工重型起重机远程智能操控系统
起重机远程智能操控系统采用无线视频技术、无线网络通讯技术,结合平板等智能设备的移动终端软件,当智能设备连接起重机车辆上的无线路由器后,可通过系统实现起重机车辆信息查看、故障诊断、虚拟仪表等功能。帮助徐
了解详情
与w88win手机版登录一起
触碰现在,感知未来
027-81803001
联系邮箱:
service@lingtuvr.com
联系地址:
武汉市东湖高新技术开发区大学园路2号徽商大厦B座


企业公众号
鄂ICP备16014868号-1
w88win手机版登录版权所有Copyright © 2019-2021
