ROV水下作业仿真系统利用数值仿真和视景仿真技术对ROV水下作业进行可视化虚拟仿真,可以模拟ROV水下作业流程,测试ROV的各项性能指标并对作业方案的可行性进行预评估和优化,能够降低ROV在海上试验的风险,缩短试验周期,节约经济成本。此外,ROV水下作业仿真系统还可以为操作人员的培训和教育提供平台,让操作人熟悉ROV水下作业的操作和控制,对提高机器人的应用水平和效率具有重要意义。

1. ROV水下作业仿真系统功能
ROV水下作业仿真系统作为调试平台,对控制系统各分系统进行调试和检验。通过水下作业仿真系统测试,在实验室环境下,对所研究的ROV进行正式试验之前的试验性评估。其主要具备以下功能:
1.1 准确描述ROV的实时运动状态
1.2 构造逼真的三维模型和视觉场景
1.3快速逼真地再现仿真环境,实时响应交互操作
1.4 对ROV操作人员进行模拟训练与考核
2. ROV水下作业仿真系统设计
ROV水下作业仿真系统主要由ROV运动仿真系统、ROV视景仿真系统及ROV训练管理仿真系统三部分组成。三个系统相互协调,相互作用,保证了智能控制系统硬软件的完整性和校验严密的可靠性。在ROV水下作业仿真系统设计方面,可以全部采用计算机来模拟各个模块的工作情况,或者通过实物仿真与虚拟仿真相结合的方法建立ROV半实物运动仿真系统,由于在整个仿真回路中加入了实际的硬件,这样不仅能够对整个系统的软件逻辑进行测试,同时能够对ROV控制系统的数据接口、可靠性都进行验证。
2.1 ROV视景仿真系统
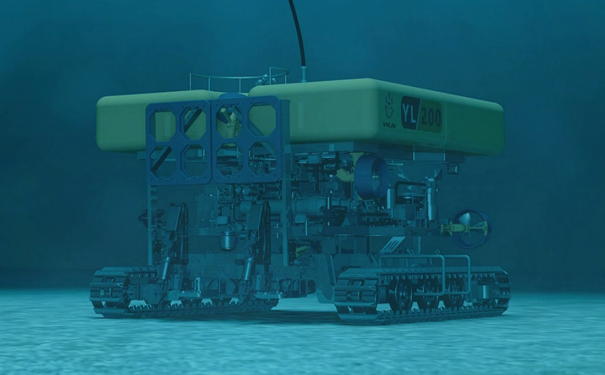
视景仿真是虚拟现实技术的重要表现形式,它采用计算机图形图像技术,根据仿真的目的,构造仿真对象的三维模型并再现真实的环境。ROV视景仿真系统通过模拟生成ROV各种作业环境场景,利用实时三维视景软件实时驱动 ROV 三维模型和场景模型,逼真模拟ROV航行环境,实时显示ROV作业动态视觉效果,使用户产生身临其境的交互式仿真环境,以利于仿真实验人员在线的对仿真过程和仿真结果进行分析、评判和决策。
ROV视景仿真系统可分为ROV仿真环境制作和ROV仿真驱动两个部分。其中ROV仿真环境制作主要包括:ROV模型设计、ROV运行场景构造、ROV纹理设计制作、ROV特效设计。ROV仿真驱动主要包括:场景驱动、模型调动处理、、碰撞检测、视点切换。
2.2 ROV运动仿真系统
运动仿真的主要目的是能够在给定操纵指令情况下,实时准确地反映出ROV当前的运动状态,包括(角)速度,(角)加速度,空间位置和姿态等等,为操纵性能、稳定性能和运动能力的分析提供依据,并为以后的控制系统设计和方法选取提供调试平台。
要建立ROV运动仿真系统,首先要建立ROV的运动方程,即ROV仿真数学模型。方程建立需要确定ROV的运动坐标系统和其所受的各种力和力矩,包括:重力(矩),浮力(矩),推进器推力(矩),艇体的流体动力(矩),控制面(舵翼)的作用力(矩)及其它扰动力(矩)等等。然后编写相应的程序,得到ROV的运动性能,再根据运动方程来建立仿真平台,在时域内解算ROV的运动状态,进而对ROV的操纵性能,稳定性能和运动能力进行分析。ROV运动仿真系统主要包括:ROV运动数学模型、拖缆运动数学模型、海流运动数学模型、推进器设备仿真模型、输入输出接口等子系统。
2.3 ROV训练管理仿真系统
训练管理系统作为整个ROV水下作业仿真系统的中央控制单元,是最主要的操作与控制平台。训练管理系统涵盖的功能方方面面,其主要功能有:训练任务生成、训练控制管理、训练场景重现、成绩智能评估、系统信息管理。
ROV训练管理系统主要用于:
(1)负责ROV水下作业仿真系统的开、关机操纵和系统故障的诊断和定位供教练员设置训练项目,控制训练过程,监督学员操作、回放操作过程以及评估学员成绩等
(2)训练管理系统以图形、对话框、菜单、工具条等为主体,提供交互友好的人机界面,帮助教练员更方便的设置任务、更快的获取训练过程和模拟器的运行状况等重要信息。

3. ROV水下作业仿真系统关键技术
3.1 ROV运动数学模型的建立
ROV运动数学模型是ROV水下作业仿真系统的核心部分。ROV的位置变化,各种运动参数等都依赖于模型的解算,可以想象模型的准确与否是ROV水下作业仿真系统的关键。由于深海洋流对ROV的运动影响较大,同时ROV与拖缆之间存在耦合运动,拖缆自身的运动状况也较为复杂,如何建立准确的ROV运动数学模型是ROV水下作业仿真系统的一大难点。
ROV水下作业仿真系统根据目标ROV的水动力参数,计算不同推进电压条件下ROV的运动响应,存放于数据库中。在模拟操作训练过程中,根据具体环境与操作指令进行实时计算得到ROV实时运动响应,根据相对运动原理确定跟踪视点和视线并传送给视景仿真子系统。
3.2 海底大地形建模
ROV作业的海底大地形是海洋场景的重要组成部分,也是海洋仿真的关键技术,它的逼真度和实时性会影响仿真演练作业。海底大地形建立的关键问题在于地形生成算法的选择、地形纹理的粘贴、矢量特征的添加。
利用Creator的专用地形模块-Terrain,建立海底地形项目。将项目所需的原始地形数据、纹理数据、矢量特征数据调入地形面板,并设置地形转换的相关参数,包括LOD、投影方式、地球椭球体、三角化算法和采样率等。项目生成海底地形后,进入Creator的3D观察窗口,查看海底地形效果,
3.3 海洋环境仿真
ROV作业的海洋场景仿真的视觉效果是影响受训人员沉浸感的关键因素之一,它的逼真度直接影响到用户进行作业流程观察、操作控制分析和训练效果评估,而它的实时性则影响到操作人员在其中进行各种复杂任务的交互操作和作业方案演练。海浪实时生成与显示和水下环境的逼真模拟是其中的关键问题。
利用Vega专用的海洋模块-VegaMarine,通过调用vgInitMarineO)函数初始化Marine模块,建立海洋场景,模拟动态海浪效果。模块中包括动态和静态海洋模型、域矢量效果、以及海洋特技效果,可以建立静态的海洋、动态海洋(三维波浪)、漂浮物等。3D动态海洋的控制参数包括:细节文理、线程设置、动态海洋半径、最大网格行数/列数以及海洋效果的计算。同时利用Vega的大气环境模块设置能见度来模拟水下场景。

ROV水下作业仿真系统通过搭建接近真实环境的视景仿真场景,有效降低海上事故发生的概率,缩短设备研制周期、提高研发质量并节约经费。在此场景中培训ROV操作员操作机械手的熟练度、快速验证不同水下工况的可行性。通过整体的仿真验证方案的可行性,为水下机械手作业提供可靠依据。