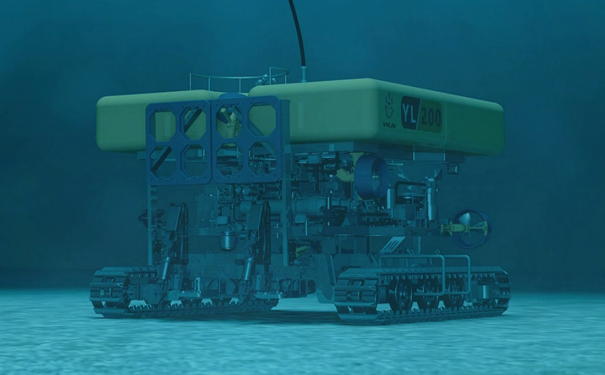
ROV虚拟仿真培训系统基于ROV培训控制间,采用ROV模拟训练器结合虚拟仿真培训软件的半实物仿真培训方式,可模拟真实 ROV 训练过程,开展 ROV 常规操作训练,并构建典型训练场景,完成ROV 接装后的日常培训,有效促进 ROV 操作人员水下作业能力快速形成,减少水下作业发生危险的可能性并大幅降低训练成本。

1. ROV虚拟仿真培训系统构建
ROV虚拟仿真培训系统由硬件平台和软件平台组成。
1.1 硬件平台
ROV虚拟仿真培训系统硬件组成主要由两台计算机与数据切换模块组成,计算机分别是数据解算计算机和视景仿真计算机。数据切换模块则决定主控计算机、副控计算机、两个七功能机械手与成像声纳的水面端是接入真实的潜器系统还是模拟训练系统。
1.2 软件平台
ROV虚拟仿真培训系统的软件由数据解算软件和三维视景软件两个部分组成
1.2.1 数据解算软件
数据解算软件运行在数据解算计算机上,主要完成的任务如下:
(1)潜水器动力学解算,重点考虑推力、浮力、阻力、负载、系绳张力、重量、平衡、水流和碰撞等因素;
(2)潜水器过程数据解算;
(3)机械手主手控制数据解算;
(4)UDP 网络通信;
(5)将所有收集到的数据,包含输入输出、故障、参数、操作、日志等信息,存储在硬盘上。
1.2.2 三维视景软件
三维视景软件运行在视景仿真计算机上。主要完成的任务如下:
(1)潜水器本体、机械手及搭载设备的三维模型模拟,并重点模拟潜器的深度、航向、俯仰、纵倾、高度、打底速度、相对位置以及核辐射信息等;
(2)虚拟三维环境数据反馈;
(3)虚拟成像声纳模拟;
(4)虚拟摄像机的视频模拟;
(5)推进器特效、灯光特效等视景特效模拟;
(6)虚拟收放系统和铠缆模拟;
(7)典型作业场景和典型作业目标模拟,模拟器能够模拟水下地形及特征,支持动态照明、景深效果以及潮汐效果,虚拟环境照明随着深度的增加而减小,并支持插入导管架、管道、油气等设施,建立典型作业场景,支持多个深度段的不同水流状况;
(8)虚拟故障模拟、训练记录回放以及训练任务配置。当控制软件切换至“实际运行”后,控制台接收来自水下的传感器信息、视频信息与成像声纳信息,完成水下潜器的驾驶、机械手的操作与作业工具的控制等。当切换至“模拟训练”模式后(此时水下部分不得上电),主控计算机发送控制(操作)数据到数据解算计算机,由其进行潜器动力学计算,并将计算结果分发给主控计算机、副控计算机以及视景仿真计算机。

2. ROV虚拟仿真培训系统功能
ROV虚拟仿真培训系统包含新手培训、水面作业方案制定、方案演练与改进等三个方面的模拟训练能力,随时都可开展模拟训练与方案演练。针对初学者开展的模拟训练,完全基于模拟训练环境,有助于操作人员快速上手。针对实际下水作业,可借助模拟训练器的水下场景,制定作业方案,然后有针对性地开展演练,并且通过实际演练不断改善作业方案,如此可减少水下作业发生危险,提升作业效率与安全性。具体功能如下:
(1)动力学
通过三维模型以及水动力模型进行动力解算,实现水下机器人在水下作业环境中的运动模拟。
(2)潜器信息
能够模拟潜器的深度、航向、俯仰、纵倾、高度、打底速度、相对位置等信息。
(3)推进器
能够模拟推进器的旋转与水花特效等。
(4)水下灯
模拟真实潜器系统的水下灯,并与真实位置和功能相同。
(5)摄像机
能够真实模拟潜器的全部水下摄像机通道,并支持随云台转动调整视角功能,模拟灯光对摄像的成像效果等。
(6)自动控制
ROV虚拟仿真培训系统能够模拟潜器的自动定向、自动定深、自动定高、自动定速以及动力定位等功能。
(7)图像声纳
ROV虚拟仿真培训系统能够模拟标准声纳的功能和效果,包括声纳从水下目标反馈图像,地形的阴影和特征,声学噪声等。
(8)紧急系统
ROV虚拟仿真培训系统能够模拟频闪灯、示位信标等.
(9)液压系统
模拟真实潜器系统的液压系统,模拟液压压力和流量等。
(10)机械手
能够模拟两个七功能机械手,进行目标物布放、抓取等全部动作。
(11)水下作业工具
仿真模拟水下作业工具,包括但不限于下列工具:
液压剪切器1套、海水冲洗枪1套、缆绳释放器1套、夹持器2套、拧螺栓工具1套、阀门开启工具1套、吸附固定工具1套。
(12)故障
能够模拟潜器在作业过程可能产生的全部故障。
(13)水下场景
能够精准模拟水下地形及特征、多个深度段的不同水流状况.
(14)水下目标
能够模拟水下物体与设施上的执行机构,并能够与潜器进行高度交互
(15)收放系统
能够模拟绞车转动、摆动架的摆动与回转、 A型架的内外摆动等。
(16)教练员系统
教练员系统可进行训练内容的编制,包括作业内容设置,运行故障设置,作业成绩评估等;
同时用户从预定义的场景列表中进行选择,或者重播以前记录的场景日志文件;
教练员软件系统还能够允许用户在常规训练的过程中制造一些障碍剧情和进行环境参数设置。

ROV虚拟仿真培训系统通过实时采集水下机器人的潜水深度、速度和运动姿态等信息,并用这些信息更新训练系统中的物理引擎渲染动画帧,实现实时展现水下机器人的作业过程。同时操作员可以通过比对在 Unity3D 仿真渲染的动画场景与真实水试场景中水下机器人的运动差异来修正模拟训练系统的仿真环境物理参数,并对各项性能指标进行优化,确保训练系统的可操作性和趋真性。